

博尔森磁致伸缩位移传感器主要通过测量物体的位移来提供精确的位置信息。在许多应用中,除了需要获取位移信息外,还需要获取物体的速度,例如在机器人、自动化生产线、液压控制系统等领域。由于速度是位移随时间的变化率,磁致伸缩位移传感器可以通过以下几种方式来检测物体的速度。

1. 基于位移数据的速度计算
由于速度是位移对时间的导数,磁致伸缩位移传感器本身提供的是位移信息,因此可以通过计算位移的变化率来间接获得速度信息。具体来说,速度可以通过以下步骤计算:
(1) 获取位移数据
博尔森磁致伸缩位移传感器实时测量物体的位移,输出位移信号(如电流或电压信号、数字信号等)。这些位移数据通常是传感器在特定时间点的测量值。
(2) 时间间隔
通过控制系统或外部设备记录每个采样时刻的时间戳。位移传感器的输出通常会定时更新,控制系统会根据时间间隔计算相邻两次位移之间的变化。
(3) 计算速度
速度是位移的时间变化率,因此可以使用以下公式计算速度:
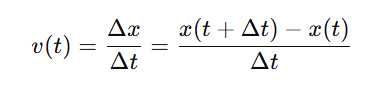
其中:
- v(t)是在时间 t时刻的速度。
- x(t)是在时间 t时刻的位移。
- Δt是两个连续时间点之间的时间间隔。
(4) 平滑处理
在实际应用中,由于噪声或测量误差,直接通过位移的变化来计算速度可能会产生波动。因此,通常会对速度数据进行平滑处理,例如使用低通滤波器或卡尔曼滤波器等方法,以减少噪声的影响,并提高速度计算的稳定性。
2. 通过传感器内部计算速度
一些现代的磁致伸缩位移传感器不仅提供位移输出,还可能包含内置的速度计算功能。这些传感器通过以下方式直接提供速度信号:
- 内置微处理器:一些磁致伸缩传感器内部集成了微处理器,可以实时计算位移的变化率,从而直接输出速度信号。传感器通过监测位移数据的变化,自动计算速度并输出相应的模拟或数字信号(如电流或数字脉冲信号)。
- 快速响应:内置的计算功能和硬件支持使得传感器能够快速响应物体的运动变化,适用于高速动态控制应用,如高速生产线、自动化测试设备、机器人等。
3. 使用外部编码器与传感器配合
在某些情况下,博尔森磁致伸缩位移传感器的输出可能与其他类型的传感器(如编码器)配合使用,以提高速度测量的精度和响应速度。例如,增量编码器可以与磁致伸缩传感器结合使用,通过编码器提供的旋转角度或位移变化的频率来检测速度。
- 编码器输出频率:编码器通过测量转动或位移的频率,计算出相应的速度信息。结合磁致伸缩传感器的位移数据,可以获得更高精度的速度测量。
4. 典型应用实例
- 机器人运动控制:磁致伸缩位移传感器通过实时监控机器人的关节位置,并通过计算位移变化率来提供精确的速度反馈,帮助控制系统调整机器人的运动轨迹和速度。
- 液压系统控制:在液压缸的应用中,磁致伸缩传感器可以监控缸杆的位移,通过计算位移的变化率来实时反馈液压缸的速度,帮助PLC或其他控制系统调整液压流量和压力,优化系统响应。
- 自动化生产线:在高速自动化生产线中,传感器监控工作台或传送带的位置变化,通过速度反馈调整生产过程的速度,确保生产线的精确同步。
5. 速度测量的优势与挑战
优势:
- 高精度:通过磁致伸缩位移传感器的精确位移测量,可以实现高精度的速度测量,尤其适用于高要求的应用。
- 实时反馈:速度是位移随时间的变化,因此磁致伸缩传感器可以提供快速、实时的速度反馈,适用于动态控制系统。
- 简化设计:在不需要额外安装速度传感器的情况下,通过位移数据计算速度可以简化系统设计,减少额外设备的需求。
挑战:
- 噪声影响:位移数据的噪声可能影响速度计算的精度。需要使用滤波算法对数据进行平滑处理,以减少噪声影响。
- 采样频率:位移传感器的采样频率决定了速度计算的响应速度。在高速动态控制系统中,传感器需要足够高的采样频率以保证速度计算的实时性。
- 计算延迟:速度是位移的变化率,因此在计算时可能会引入一定的延迟,尤其在复杂控制系统中,可能需要优化速度计算和控制系统的反馈回路。
6. 总结
博尔森磁致伸缩位移传感器通过测量位移并计算位移变化率,能够提供精确的速度信息。无论是通过计算位移的变化率、内置微处理器的速度计算,还是与外部编码器配合使用,磁致伸缩位移传感器都能够高效、准确地检测物体的速度。对于高速动态控制和精密测量应用,如机器人、液压控制、自动化生产线等,磁致伸缩位移传感器的速度检测功能提供了重要的支持。
 微信扫一扫
微信扫一扫
